Associative containers are typically parametrized by various policies. For example, a hash-based associative container is parametrized by a hash-functor, transforming each key into an non-negative numerical type. Each such value is then further mapped into a position within the table. The mapping of a key into a position within the table is therefore a two-step process.
In some cases, instantiations are redundant. For example, when the keys are integers, it is possible to use a redundant hash policy, which transforms each key into its value.
In some other cases, these policies are irrelevant. For example, a hash-based associative container might transform keys into positions within a table by a different method than the two-step method described above. In such a case, the hash functor is simply irrelevant.
When a policy is either redundant or irrelevant, it can be replaced
by null_type.
For example, a set is an associative
container with one of its template parameters (the one for the
mapped type) replaced with null_type. Other
places simplifications are made possible with this technique
include node updates in tree and trie data structures, and hash
and probe functions for hash data structures.
Anyone familiar with the standard knows that there are four kinds of associative containers: maps, sets, multimaps, and multisets. The map datatype associates each key to some data.
Sets are associative containers that simply store keys -
they do not map them to anything. In the standard, each map class
has a corresponding set class. E.g.,
std::map<int, char> maps each
int to a char, but
std::set<int, char> simply stores
ints. In this library, however, there are no
distinct classes for maps and sets. Instead, an associative
container's Mapped template parameter is a policy: if
it is instantiated by null_type, then it
is a "set"; otherwise, it is a "map". E.g.,
cc_hash_table<int, char>
is a "map" mapping each int value to a char, but
cc_hash_table<int, null_type>
is a type that uniquely stores int values.
Once the Mapped template parameter is instantiated
by null_type, then
the "set" acts very similarly to the standard's sets - it does not
map each key to a distinct null_type object. Also,
, the container's value_type is essentially
its key_type - just as with the standard's sets
.
The standard's multimaps and multisets allow, respectively,
non-uniquely mapping keys and non-uniquely storing keys. As
discussed, the
reasons why this might be necessary are 1) that a key might be
decomposed into a primary key and a secondary key, 2) that a
key might appear more than once, or 3) any arbitrary
combination of 1)s and 2)s. Correspondingly,
one should use 1) "maps" mapping primary keys to secondary
keys, 2) "maps" mapping keys to size types, or 3) any arbitrary
combination of 1)s and 2)s. Thus, for example, an
std::multiset<int> might be used to store
multiple instances of integers, but using this library's
containers, one might use
tree<int, size_t>
i.e., a map of ints to
size_ts.
These "multimaps" and "multisets" might be confusing to
anyone familiar with the standard's std::multimap and
std::multiset, because there is no clear
correspondence between the two. For example, in some cases
where one uses std::multiset in the standard, one might use
in this library a "multimap" of "multisets" - i.e., a
container that maps primary keys each to an associative
container that maps each secondary key to the number of times
it occurs.
When one uses a "multimap," one should choose with care the type of container used for secondary keys.
Brace onself: this library does not contain containers like
std::multimap or
std::multiset. Instead, these data
structures can be synthesized via manipulation of the
Mapped template parameter.
One maps the unique part of a key - the primary key, into an associative-container of the (originally) non-unique parts of the key - the secondary key. A primary associative-container is an associative container of primary keys; a secondary associative-container is an associative container of secondary keys.
Stepping back a bit, and starting in from the beginning.
Maps (or sets) allow mapping (or storing) unique-key values.
The standard library also supplies associative containers which
map (or store) multiple values with equivalent keys:
std::multimap, std::multiset,
std::tr1::unordered_multimap, and
unordered_multiset. We first discuss how these might
be used, then why we think it is best to avoid them.
Suppose one builds a simple bank-account application that
records for each client (identified by an std::string)
and account-id (marked by an unsigned long) -
the balance in the account (described by a
float). Suppose further that ordering this
information is not useful, so a hash-based container is
preferable to a tree based container. Then one can use
std::tr1::unordered_map<std::pair<std::string, unsigned long>, float, ...>
which hashes every combination of client and account-id. This might work well, except for the fact that it is now impossible to efficiently list all of the accounts of a specific client (this would practically require iterating over all entries). Instead, one can use
std::tr1::unordered_multimap<std::pair<std::string, unsigned long>, float, ...>
which hashes every client, and decides equivalence based on client only. This will ensure that all accounts belonging to a specific user are stored consecutively.
Also, suppose one wants an integers' priority queue
(a container that supports push,
pop, and top operations, the last of which
returns the largest int) that also supports
operations such as find and lower_bound. A
reasonable solution is to build an adapter over
std::set<int>. In this adapter,
push will just call the tree-based
associative container's insert method; pop
will call its end method, and use it to return the
preceding element (which must be the largest). Then this might
work well, except that the container object cannot hold
multiple instances of the same integer (push(4),
will be a no-op if 4 is already in the
container object). If multiple keys are necessary, then one
might build the adapter over an
std::multiset<int>.
The standard library's non-unique-mapping containers are useful when (1) a key can be decomposed in to a primary key and a secondary key, (2) a key is needed multiple times, or (3) any combination of (1) and (2).
The graphic below shows how the standard library's container design works internally; in this figure nodes shaded equally represent equivalent-key values. Equivalent keys are stored consecutively using the properties of the underlying data structure: binary search trees (label A) store equivalent-key values consecutively (in the sense of an in-order walk) naturally; collision-chaining hash tables (label B) store equivalent-key values in the same bucket, the bucket can be arranged so that equivalent-key values are consecutive.
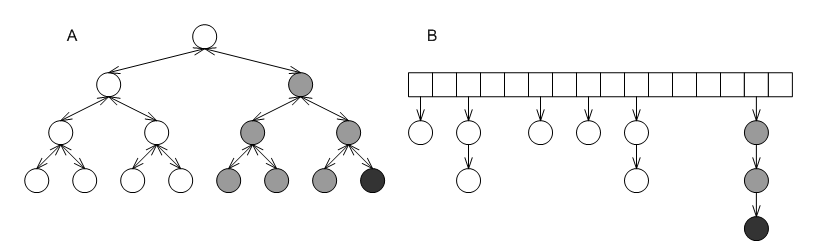
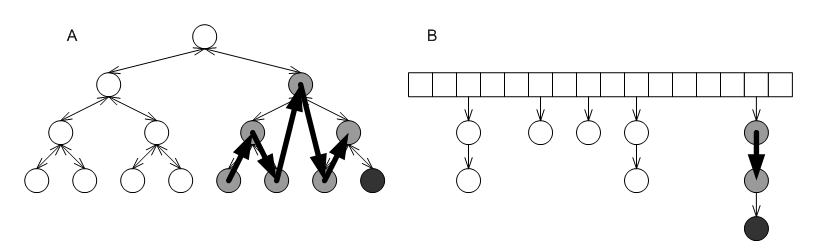
Put differently, the standards' non-unique mapping associative-containers are associative containers that map primary keys to linked lists that are embedded into the container. The graphic below shows again the two containers from the first graphic above, this time with the embedded linked lists of the grayed nodes marked explicitly.
These embedded linked lists have several disadvantages.
The underlying data structure embeds the linked lists according to its own consideration, which means that the search path for a value might include several different equivalent-key values. For example, the search path for the the black node in either of the first graphic, labels A or B, includes more than a single gray node.
The links of the linked lists are the underlying data structures' nodes, which typically are quite structured. In the case of tree-based containers (the grapic above, label B), each "link" is actually a node with three pointers (one to a parent and two to children), and a relatively-complicated iteration algorithm. The linked lists, therefore, can take up quite a lot of memory, and iterating over all values equal to a given key (through the return value of the standard library's
equal_range) can be expensive.The primary key is stored multiply; this uses more memory.
Finally, the interface of this design excludes several useful underlying data structures. Of all the unordered self-organizing data structures, practically only collision-chaining hash tables can (efficiently) guarantee that equivalent-key values are stored consecutively.
The above reasons hold even when the ratio of secondary keys to primary keys (or average number of identical keys) is small, but when it is large, there are more severe problems:
The underlying data structures order the links inside each embedded linked-lists according to their internal considerations, which effectively means that each of the links is unordered. Irrespective of the underlying data structure, searching for a specific value can degrade to linear complexity.
Similarly to the above point, it is impossible to apply to the secondary keys considerations that apply to primary keys. For example, it is not possible to maintain secondary keys by sorted order.
While the interface "understands" that all equivalent-key values constitute a distinct list (through
equal_range), the underlying data structure typically does not. This means that operations such as erasing from a tree-based container all values whose keys are equivalent to a a given key can be super-linear in the size of the tree; this is also true also for several other operations that target a specific list.
In this library, all associative containers map (or store) unique-key values. One can (1) map primary keys to secondary associative-containers (containers of secondary keys) or non-associative containers (2) map identical keys to a size-type representing the number of times they occur, or (3) any combination of (1) and (2). Instead of allowing multiple equivalent-key values, this library supplies associative containers based on underlying data structures that are suitable as secondary associative-containers.
In the figure below, labels A and B show the equivalent underlying data structures in this library, as mapped to the first graphic above. Labels A and B, respectively. Each shaded box represents some size-type or secondary associative-container.
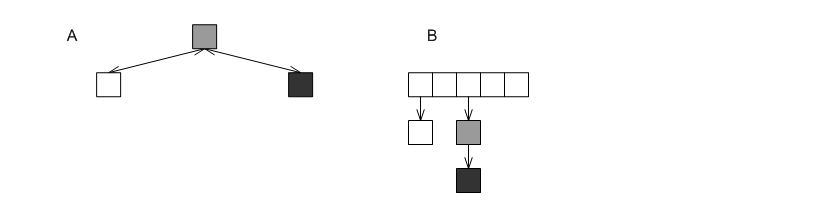
In the first example above, then, one would use an associative
container mapping each user to an associative container which
maps each application id to a start time (see
example/basic_multimap.cc); in the second
example, one would use an associative container mapping
each int to some size-type indicating the
number of times it logically occurs
(see example/basic_multiset.cc.
See the discussion in list-based container types for containers especially suited as secondary associative-containers.
Iterator concepts are bifurcated in this design, and are comprised of point-type and range-type iteration.
A point-type iterator is an iterator that refers to a specific
element as returned through an
associative-container's find method.
A range-type iterator is an iterator that is used to go over a
sequence of elements, as returned by a container's
find method.
A point-type method is a method that returns a point-type iterator; a range-type method is a method that returns a range-type iterator.
For most containers, these types are synonymous; for self-organizing containers, such as hash-based containers or priority queues, these are inherently different (in any implementation, including that of C++ standard library components), but in this design, it is made explicit. They are distinct types.
When using this library, is necessary to differentiate between two types of methods and iterators: point-type methods and iterators, and range-type methods and iterators. Each associative container's interface includes the methods:
point_const_iterator find(const_key_reference r_key) const; point_iterator find(const_key_reference r_key); std::pair<point_iterator,bool> insert(const_reference r_val);
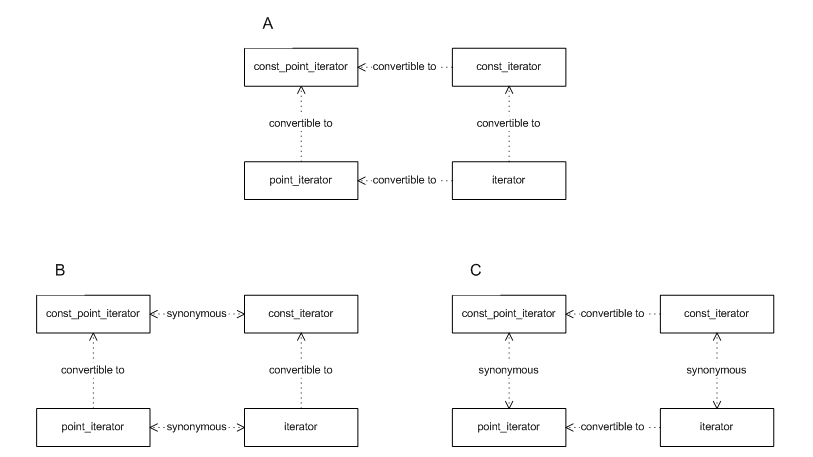
The relationship between these iterator types varies between
container types. The figure below
shows the most general invariant between point-type and
range-type iterators: In A iterator, can
always be converted to point_iterator. In B
shows invariants for order-preserving containers: point-type
iterators are synonymous with range-type iterators.
Orthogonally, Cshows invariants for "set"
containers: iterators are synonymous with const iterators.
Note that point-type iterators in self-organizing containers
(hash-based associative containers) lack movement
operators, such as operator++ - in fact, this
is the reason why this library differentiates from the standard C++ librarys
design on this point.
Typically, one can determine an iterator's movement
capabilities using
std::iterator_traits<It>iterator_category,
which is a struct indicating the iterator's
movement capabilities. Unfortunately, none of the standard predefined
categories reflect a pointer's not having any
movement capabilities whatsoever. Consequently,
pb_ds adds a type
trivial_iterator_tag (whose name is taken from
a concept in C++ standardese, which is the category of iterators
with no movement capabilities.) All other standard C++ library
tags, such as forward_iterator_tag retain their
common use.
If one manipulates a container object, then iterators previously obtained from it can be invalidated. In some cases a previously-obtained iterator cannot be de-referenced; in other cases, the iterator's next or previous element might have changed unpredictably. This corresponds exactly to the question whether a point-type or range-type iterator (see previous concept) is valid or not. In this design, one can query a container (in compile time) about its invalidation guarantees.
Given three different types of associative containers, a modifying
operation (in that example, erase) invalidated
iterators in three different ways: the iterator of one container
remained completely valid - it could be de-referenced and
incremented; the iterator of a different container could not even be
de-referenced; the iterator of the third container could be
de-referenced, but its "next" iterator changed unpredictably.
Distinguishing between find and range types allows fine-grained invalidation guarantees, because these questions correspond exactly to the question of whether point-type iterators and range-type iterators are valid. The graphic below shows tags corresponding to different types of invalidation guarantees.
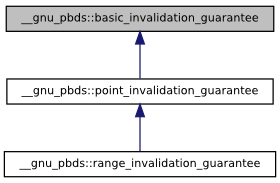
basic_invalidation_guaranteecorresponds to a basic guarantee that a point-type iterator, a found pointer, or a found reference, remains valid as long as the container object is not modified.point_invalidation_guaranteecorresponds to a guarantee that a point-type iterator, a found pointer, or a found reference, remains valid even if the container object is modified.range_invalidation_guaranteecorresponds to a guarantee that a range-type iterator remains valid even if the container object is modified.
To find the invalidation guarantee of a container, one can use
typename container_traits<Cntnr>::invalidation_guarantee
Note that this hierarchy corresponds to the logic it
represents: if a container has range-invalidation guarantees,
then it must also have find invalidation guarantees;
correspondingly, its invalidation guarantee (in this case
range_invalidation_guarantee)
can be cast to its base class (in this case point_invalidation_guarantee).
This means that this this hierarchy can be used easily using
standard metaprogramming techniques, by specializing on the
type of invalidation_guarantee.
These types of problems were addressed, in a more general setting, in [biblio.meyers96more] - Item 2. In our opinion, an invalidation-guarantee hierarchy would solve these problems in all container types - not just associative containers.
The design attempts to address the following problem of data-structure genericity. When writing a function manipulating a generic container object, what is the behavior of the object? Suppose one writes
template<typename Cntnr>
void
some_op_sequence(Cntnr &r_container)
{
...
}
then one needs to address the following questions in the body
of some_op_sequence:
Which types and methods does
Cntnrsupport? Containers based on hash tables can be queries for the hash-functor type and object; this is meaningless for tree-based containers. Containers based on trees can be split, joined, or can erase iterators and return the following iterator; this cannot be done by hash-based containers.What are the exception and invalidation guarantees of
Cntnr? A container based on a probing hash-table invalidates all iterators when it is modified; this is not the case for containers based on node-based trees. Containers based on a node-based tree can be split or joined without exceptions; this is not the case for containers based on vector-based trees.How does the container maintain its elements? Tree-based and Trie-based containers store elements by key order; others, typically, do not. A container based on a splay trees or lists with update policies "cache" "frequently accessed" elements; containers based on most other underlying data structures do not.
How does one query a container about characteristics and capabilities? What is the relationship between two different data structures, if anything?
The remainder of this section explains these issues in detail.
Tags are very useful for manipulating generic types. For example, if
It is an iterator class, then typename
It::iterator_category or typename
std::iterator_traits<It>::iterator_category will
yield its category, and typename
std::iterator_traits<It>::value_type will yield its
value type.
This library contains a container tag hierarchy corresponding to the diagram below.
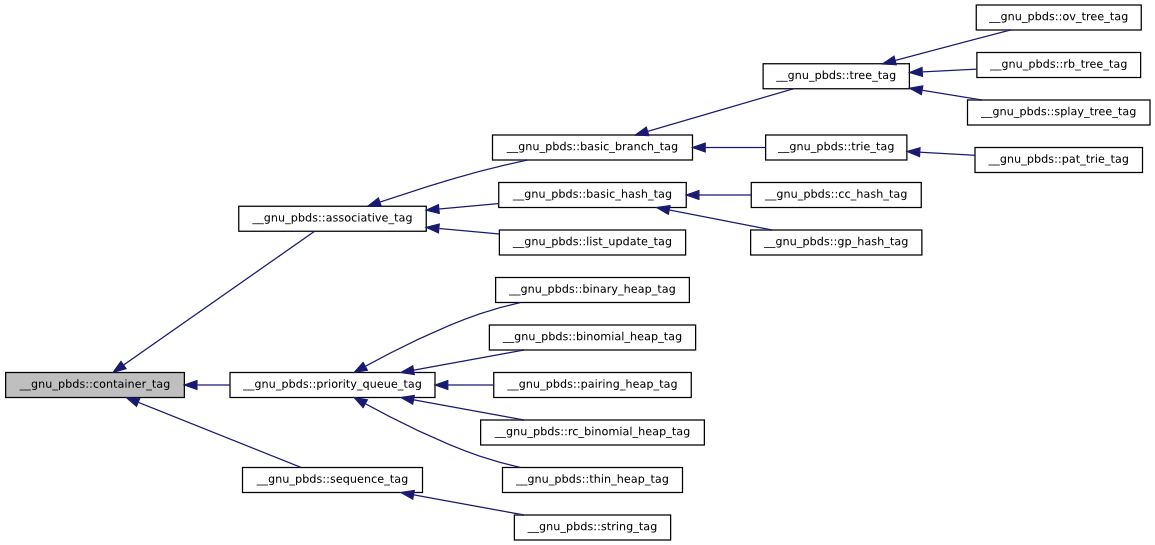
Given any container Cntnr, the tag of
the underlying data structure can be found via typename
Cntnr::container_category.
Additionally, a traits mechanism can be used to query a
container type for its attributes. Given any container
Cntnr, then <Cntnr>
is a traits class identifying the properties of the
container.
To find if a container can throw when a key is erased (which is true for vector-based trees, for example), one can use
container_traits<Cntnr>::erase_can_throw
Some of the definitions in container_traits
are dependent on other
definitions. If container_traits<Cntnr>::order_preserving
is true (which is the case for containers
based on trees and tries), then the container can be split or
joined; in this
case, container_traits<Cntnr>::split_join_can_throw
indicates whether splits or joins can throw exceptions (which is
true for vector-based trees);
otherwise container_traits<Cntnr>::split_join_can_throw
will yield a compilation error. (This is somewhat similar to a
compile-time version of the COM model).
The collision-chaining hash-based container has the following declaration.
template< typename Key, typename Mapped, typename Hash_Fn = std::hash<Key>, typename Eq_Fn = std::equal_to<Key>, typename Comb_Hash_Fn = direct_mask_range_hashing<> typename Resize_Policy = default explained below. bool Store_Hash = false, typename Allocator = std::allocator<char> > class cc_hash_table;
The parameters have the following meaning:
Keyis the key type.Mappedis the mapped-policy.Hash_Fnis a key hashing functor.Eq_Fnis a key equivalence functor.Comb_Hash_Fnis a range-hashing_functor; it describes how to translate hash values into positions within the table.Resize_Policydescribes how a container object should change its internal size.Store_Hashindicates whether the hash value should be stored with each entry.Allocatoris an allocator type.
The probing hash-based container has the following declaration.
template< typename Key, typename Mapped, typename Hash_Fn = std::hash<Key>, typename Eq_Fn = std::equal_to<Key>, typename Comb_Probe_Fn = direct_mask_range_hashing<> typename Probe_Fn = default explained below. typename Resize_Policy = default explained below. bool Store_Hash = false, typename Allocator = std::allocator<char> > class gp_hash_table;
The parameters are identical to those of the collision-chaining container, except for the following.
Comb_Probe_Fndescribes how to transform a probe sequence into a sequence of positions within the table.Probe_Fndescribes a probe sequence policy.
Some of the default template values depend on the values of other parameters, and are explained below.
Following is an explanation of some functions which hashing involves. The graphic below illustrates the discussion.
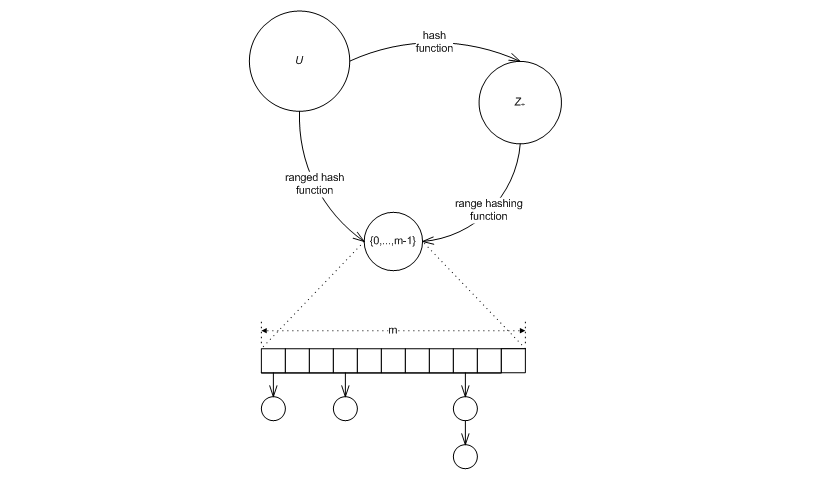
Let U be a domain (e.g., the integers, or the strings of 3 characters). A hash-table algorithm needs to map elements of U "uniformly" into the range [0,..., m - 1] (where m is a non-negative integral value, and is, in general, time varying). I.e., the algorithm needs a ranged-hash function
f : U × Z+ → Z+
such that for any u in U ,
0 ≤ f(u, m) ≤ m - 1
and which has "good uniformity" properties (say [biblio.knuth98sorting].) One common solution is to use the composition of the hash function
h : U → Z+ ,
which maps elements of U into the non-negative integrals, and
g : Z+ × Z+ → Z+,
which maps a non-negative hash value, and a non-negative range upper-bound into a non-negative integral in the range between 0 (inclusive) and the range upper bound (exclusive), i.e., for any r in Z+,
0 ≤ g(r, m) ≤ m - 1
The resulting ranged-hash function, is
From the above, it is obvious that given g and h, f can always be composed (however the converse is not true). The standard's hash-based containers allow specifying a hash function, and use a hard-wired range-hashing function; the ranged-hash function is implicitly composed.
The above describes the case where a key is to be mapped into a single position within a hash table, e.g., in a collision-chaining table. In other cases, a key is to be mapped into a sequence of positions within a table, e.g., in a probing table. Similar terms apply in this case: the table requires a ranged probe function, mapping a key into a sequence of positions withing the table. This is typically achieved by composing a hash function mapping the key into a non-negative integral type, a probe function transforming the hash value into a sequence of hash values, and a range-hashing function transforming the sequence of hash values into a sequence of positions.
Some common choices for range-hashing functions are the division, multiplication, and middle-square methods ([biblio.knuth98sorting]), defined as
g(r, m) = ⌈ u/v ( a r mod v ) ⌉
and
g(r, m) = ⌈ u/v ( r2 mod v ) ⌉
respectively, for some positive integrals u and v (typically powers of 2), and some a. Each of these range-hashing functions works best for some different setting.
The division method (see above) is a very common choice. However, even this single method can be implemented in two very different ways. It is possible to implement using the low level % (modulo) operation (for any m), or the low level & (bit-mask) operation (for the case where m is a power of 2), i.e.,
and
respectively.
The % (modulo) implementation has the advantage that for m a prime far from a power of 2, g(r, m) is affected by all the bits of r (minimizing the chance of collision). It has the disadvantage of using the costly modulo operation. This method is hard-wired into SGI's implementation .
The & (bit-mask) implementation has the advantage of relying on the fast bit-wise and operation. It has the disadvantage that for g(r, m) is affected only by the low order bits of r. This method is hard-wired into Dinkumware's implementation.
In cases it is beneficial to allow the client to directly specify a ranged-hash hash function. It is true, that the writer of the ranged-hash function cannot rely on the values of m having specific numerical properties suitable for hashing (in the sense used in [biblio.knuth98sorting]), since the values of m are determined by a resize policy with possibly orthogonal considerations.
There are two cases where a ranged-hash function can be superior. The firs is when using perfect hashing: the second is when the values of m can be used to estimate the "general" number of distinct values required. This is described in the following.
Let
s = [ s0,..., st - 1]
be a string of t characters, each of which is from domain S. Consider the following ranged-hash function:
where a is some non-negative integral value. This is the standard string-hashing function used in SGI's implementation (with a = 5). Its advantage is that it takes into account all of the characters of the string.
Now assume that s is the string representation of a of a long DNA sequence (and so S = {'A', 'C', 'G', 'T'}). In this case, scanning the entire string might be prohibitively expensive. A possible alternative might be to use only the first k characters of the string, where
|S|k ≥ m ,
i.e., using the hash function
requiring scanning over only
k = log4( m )
characters.
Other more elaborate hash-functions might scan k characters starting at a random position (determined at each resize), or scanning k random positions (determined at each resize), i.e., using
f3(s, m) = ∑ i = r0r0 + k - 1 si ai mod m ,
or
f4(s, m) = ∑ i = 0k - 1 sri ari mod m ,
respectively, for r0,..., rk-1 each in the (inclusive) range [0,...,t-1].
It should be noted that the above functions cannot be decomposed as per a ranged hash composed of hash and range hashing.
This sub-subsection describes the implementation of the above in this library. It first explains range-hashing functions in collision-chaining tables, then ranged-hash functions in collision-chaining tables, then probing-based tables, and finally lists the relevant classes in this library.
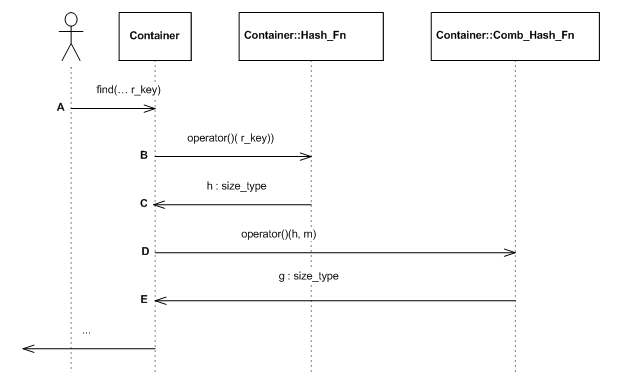
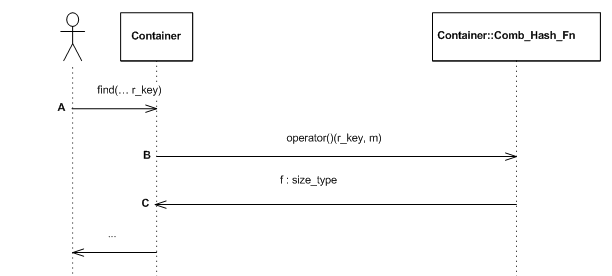
cc_hash_table is
parametrized by Hash_Fn and Comb_Hash_Fn, a
hash functor and a combining hash functor, respectively.
In general, Comb_Hash_Fn is considered a
range-hashing functor. cc_hash_table
synthesizes a ranged-hash function from Hash_Fn and
Comb_Hash_Fn. The figure below shows an insert sequence
diagram for this case. The user inserts an element (point A),
the container transforms the key into a non-negative integral
using the hash functor (points B and C), and transforms the
result into a position using the combining functor (points D
and E).
If cc_hash_table's
hash-functor, Hash_Fn is instantiated by null_type , then Comb_Hash_Fn is taken to be
a ranged-hash function. The graphic below shows an insert sequence
diagram. The user inserts an element (point A), the container
transforms the key into a position using the combining functor
(points B and C).
gp_hash_table is parametrized by
Hash_Fn, Probe_Fn,
and Comb_Probe_Fn. As before, if
Hash_Fn and Probe_Fn
are both null_type, then
Comb_Probe_Fn is a ranged-probe
functor. Otherwise, Hash_Fn is a hash
functor, Probe_Fn is a functor for offsets
from a hash value, and Comb_Probe_Fn
transforms a probe sequence into a sequence of positions within
the table.
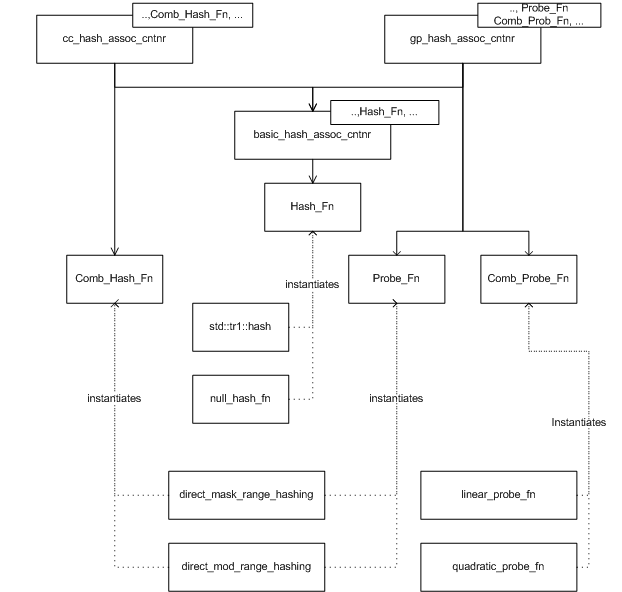
This library contains some pre-defined classes implementing range-hashing and probing functions:
direct_mask_range_hashinganddirect_mod_range_hashingare range-hashing functions based on a bit-mask and a modulo operation, respectively.linear_probe_fn, andquadratic_probe_fnare a linear probe and a quadratic probe function, respectively.
The graphic below shows the relationships.
Hash-tables, as opposed to trees, do not naturally grow or shrink. It is necessary to specify policies to determine how and when a hash table should change its size. Usually, resize policies can be decomposed into orthogonal policies:
A size policy indicating how a hash table should grow (e.g., it should multiply by powers of 2).
A trigger policy indicating when a hash table should grow (e.g., a load factor is exceeded).
Size policies determine how a hash table changes size. These policies are simple, and there are relatively few sensible options. An exponential-size policy (with the initial size and growth factors both powers of 2) works well with a mask-based range-hashing function, and is the hard-wired policy used by Dinkumware. A prime-list based policy works well with a modulo-prime range hashing function and is the hard-wired policy used by SGI's implementation.
Trigger policies determine when a hash table changes size. Following is a description of two policies: load-check policies, and collision-check policies.
Load-check policies are straightforward. The user specifies two factors, Αmin and Αmax, and the hash table maintains the invariant that
Αmin ≤ (number of stored elements) / (hash-table size) ≤ Αmaxload factor min max
Collision-check policies work in the opposite direction of load-check policies. They focus on keeping the number of collisions moderate and hoping that the size of the table will not grow very large, instead of keeping a moderate load-factor and hoping that the number of collisions will be small. A maximal collision-check policy resizes when the longest probe-sequence grows too large.
Consider the graphic below. Let the size of the hash table be denoted by m, the length of a probe sequence be denoted by k, and some load factor be denoted by Α. We would like to calculate the minimal length of k, such that if there were Α m elements in the hash table, a probe sequence of length k would be found with probability at most 1/m.

Denote the probability that a probe sequence of length k appears in bin i by pi, the length of the probe sequence of bin i by li, and assume uniform distribution. Then
P(l1 ≥ k) =
P(l1 ≥ α ( 1 + k / α - 1) ≤ (a)
e ^ ( - ( α ( k / α - 1 )2 ) /2)
where (a) follows from the Chernoff bound ([biblio.motwani95random]). To calculate the probability that some bin contains a probe sequence greater than k, we note that the li are negatively-dependent ([biblio.dubhashi98neg]) . Let I(.) denote the indicator function. Then
P ( ∑ i = 1m I(li ≥ k) ≥ 1 ) =
P ( ∑ i = 1m I ( li ≥ k ) ≥ m p1 ( 1 + 1 / (m p1) - 1 ) ) ≤ (a)
e ^ ( ( - m p1 ( 1 / (m p1) - 1 ) 2 ) / 2 ) ,
where (a) follows from the fact that the Chernoff bound can be applied to negatively-dependent variables ([biblio.dubhashi98neg]). Inserting the first probability equation into the second one, and equating with 1/m, we obtain
k ~ √ ( 2 α ln 2 m ln(m) ) ) .
This sub-subsection describes the implementation of the above in this library. It first describes resize policies and their decomposition into trigger and size policies, then describes pre-defined classes, and finally discusses controlled access the policies' internals.
Each hash-based container is parametrized by a
Resize_Policy parameter; the container derives
publicly from Resize_Policy. For
example:
cc_hash_table<typename Key, typename Mapped, ... typename Resize_Policy ...> : public Resize_Policy
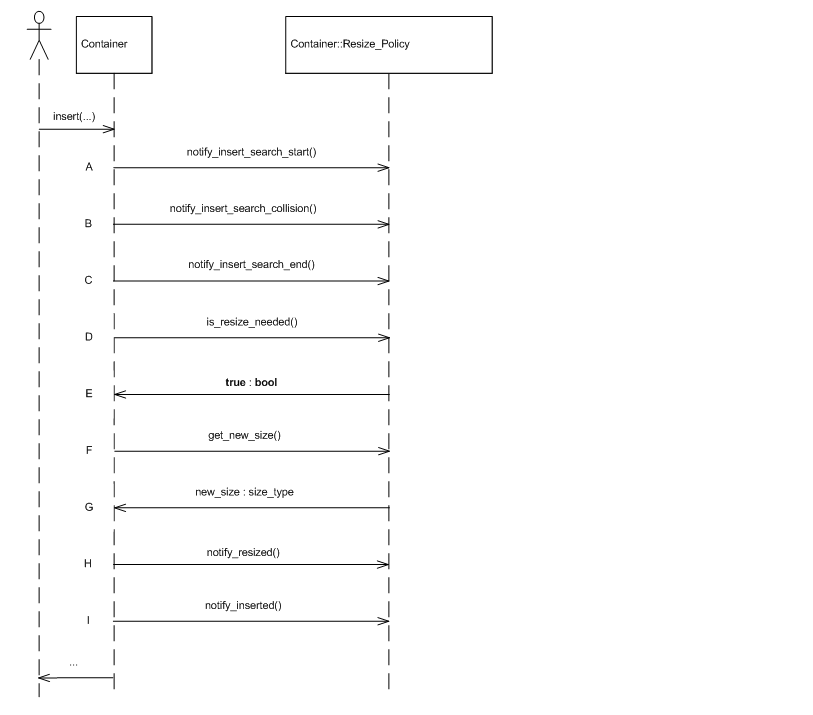
As a container object is modified, it continuously notifies
its Resize_Policy base of internal changes
(e.g., collisions encountered and elements being
inserted). It queries its Resize_Policy base whether
it needs to be resized, and if so, to what size.
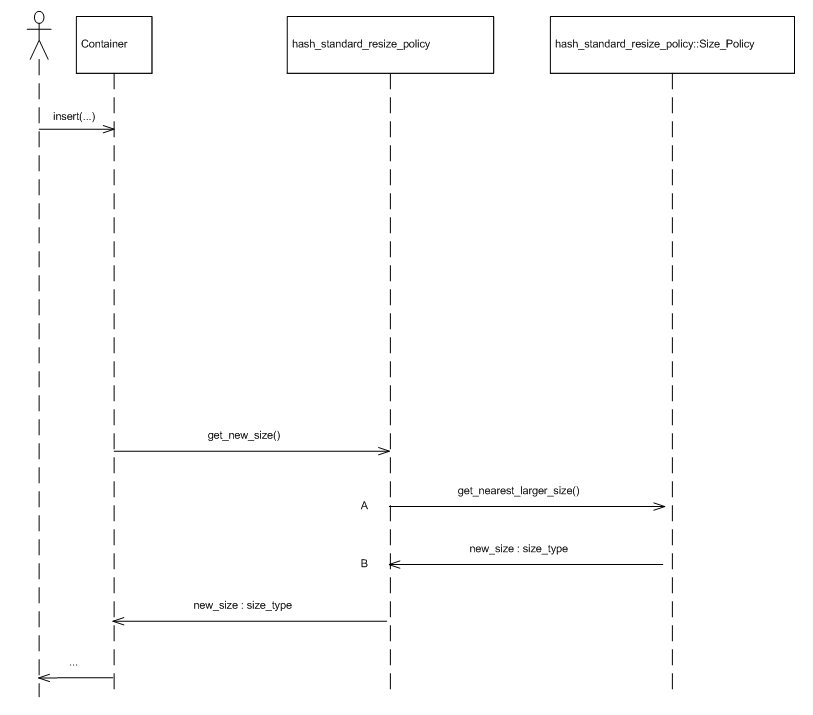
The graphic below shows a (possible) sequence diagram of an insert operation. The user inserts an element; the hash table notifies its resize policy that a search has started (point A); in this case, a single collision is encountered - the table notifies its resize policy of this (point B); the container finally notifies its resize policy that the search has ended (point C); it then queries its resize policy whether a resize is needed, and if so, what is the new size (points D to G); following the resize, it notifies the policy that a resize has completed (point H); finally, the element is inserted, and the policy notified (point I).
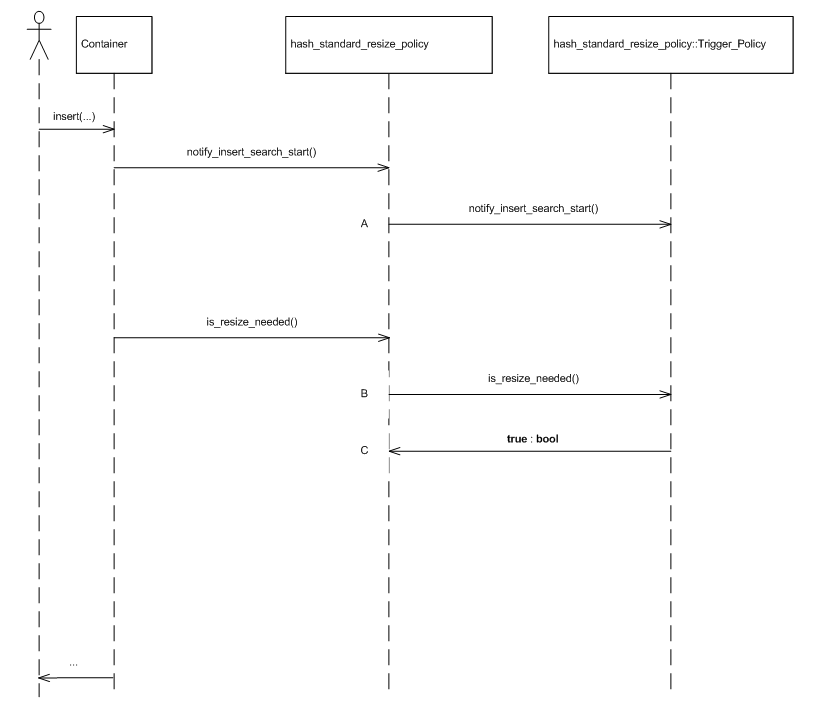
In practice, a resize policy can be usually orthogonally
decomposed to a size policy and a trigger policy. Consequently,
the library contains a single class for instantiating a resize
policy: hash_standard_resize_policy
is parametrized by Size_Policy and
Trigger_Policy, derives publicly from
both, and acts as a standard delegate ([biblio.gof])
to these policies.
The two graphics immediately below show sequence diagrams illustrating the interaction between the standard resize policy and its trigger and size policies, respectively.
The library includes the following instantiations of size and trigger policies:
hash_load_check_resize_triggerimplements a load check trigger policy.cc_hash_max_collision_check_resize_triggerimplements a collision check trigger policy.hash_exponential_size_policyimplements an exponential-size policy (which should be used with mask range hashing).hash_prime_size_policyimplementing a size policy based on a sequence of primes (which should be used with mod range hashing
The graphic below gives an overall picture of the resize-related
classes. basic_hash_table
is parametrized by Resize_Policy, which it subclasses
publicly. This class is currently instantiated only by hash_standard_resize_policy.
hash_standard_resize_policy
itself is parametrized by Trigger_Policy and
Size_Policy. Currently, Trigger_Policy is
instantiated by hash_load_check_resize_trigger,
or cc_hash_max_collision_check_resize_trigger;
Size_Policy is instantiated by hash_exponential_size_policy,
or hash_prime_size_policy.
There are cases where (controlled) access to resize
policies' internals is beneficial. E.g., it is sometimes
useful to query a hash-table for the table's actual size (as
opposed to its size() - the number of values it
currently holds); it is sometimes useful to set a table's
initial size, externally resize it, or change load factors.
Clearly, supporting such methods both decreases the encapsulation of hash-based containers, and increases the diversity between different associative-containers' interfaces. Conversely, omitting such methods can decrease containers' flexibility.
In order to avoid, to the extent possible, the above
conflict, the hash-based containers themselves do not address
any of these questions; this is deferred to the resize policies,
which are easier to change or replace. Thus, for example,
neither cc_hash_table nor
gp_hash_table
contain methods for querying the actual size of the table; this
is deferred to hash_standard_resize_policy.
Furthermore, the policies themselves are parametrized by
template arguments that determine the methods they support
(
[biblio.alexandrescu01modern]
shows techniques for doing so). hash_standard_resize_policy
is parametrized by External_Size_Access that
determines whether it supports methods for querying the actual
size of the table or resizing it. hash_load_check_resize_trigger
is parametrized by External_Load_Access that
determines whether it supports methods for querying or
modifying the loads. cc_hash_max_collision_check_resize_trigger
is parametrized by External_Load_Access that
determines whether it supports methods for querying the
load.
Some operations, for example, resizing a container at
run time, or changing the load factors of a load-check trigger
policy, require the container itself to resize. As mentioned
above, the hash-based containers themselves do not contain
these types of methods, only their resize policies.
Consequently, there must be some mechanism for a resize policy
to manipulate the hash-based container. As the hash-based
container is a subclass of the resize policy, this is done
through virtual methods. Each hash-based container has a
private virtual method:
virtual void do_resize (size_type new_size);
which resizes the container. Implementations of
Resize_Policy can export public methods for resizing
the container externally; these methods internally call
do_resize to resize the table.
Hash-tables are unfortunately especially susceptible to choice of policies. One of the more complicated aspects of this is that poor combinations of good policies can form a poor container. Following are some considerations.
Some combinations do not work well for probing containers. For example, combining a quadratic probe policy with an exponential size policy can yield a poor container: when an element is inserted, a trigger policy might decide that there is no need to resize, as the table still contains unused entries; the probe sequence, however, might never reach any of the unused entries.
Unfortunately, this library cannot detect such problems at
compilation (they are halting reducible). It therefore defines
an exception class insert_error to throw an
exception in this case.
Some trigger policies are especially susceptible to poor hash functions. Suppose, as an extreme case, that the hash function transforms each key to the same hash value. After some inserts, a collision detecting policy will always indicate that the container needs to grow.
The library, therefore, by design, limits each operation to
one resize. For each insert, for example, it queries
only once whether a resize is needed.
cc_hash_table and
gp_hash_table are
parametrized by an equivalence functor and by a
Store_Hash parameter. If the latter parameter is
true, then the container stores with each entry
a hash value, and uses this value in case of collisions to
determine whether to apply a hash value. This can lower the
cost of collision for some types, but increase the cost of
collisions for other types.
If a ranged-hash function or ranged probe function is directly supplied, however, then it makes no sense to store the hash value with each entry. This library's container will fail at compilation, by design, if this is attempted.
Assume a size policy issues an increasing sequence of sizes a, a q, a q1, a q2, ... For example, an exponential size policy might issue the sequence of sizes 8, 16, 32, 64, ...
If a load-check trigger policy is used, with loads αmin and αmax, respectively, then it is a good idea to have:
αmax ~ 1 / q
αmin < 1 / (2 q)
This will ensure that the amortized hash cost of each modifying operation is at most approximately 3.
αmin ~ αmax is, in any case, a bad choice, and αmin > α max is horrendous.
The tree-based container has the following declaration:
template< typename Key, typename Mapped, typename Cmp_Fn = std::less<Key>, typename Tag = rb_tree_tag, template< typename Const_Node_Iterator, typename Node_Iterator, typename Cmp_Fn_, typename Allocator_> class Node_Update = null_node_update, typename Allocator = std::allocator<char> > class tree;
The parameters have the following meaning:
Keyis the key type.Mappedis the mapped-policy.Cmp_Fnis a key comparison functorTagspecifies which underlying data structure to use.Node_Updateis a policy for updating node invariants.Allocatoris an allocator type.
The Tag parameter specifies which underlying
data structure to use. Instantiating it by rb_tree_tag, splay_tree_tag, or
ov_tree_tag,
specifies an underlying red-black tree, splay tree, or
ordered-vector tree, respectively; any other tag is illegal.
Note that containers based on the former two contain more types
and methods than the latter (e.g.,
reverse_iterator and rbegin), and different
exception and invalidation guarantees.
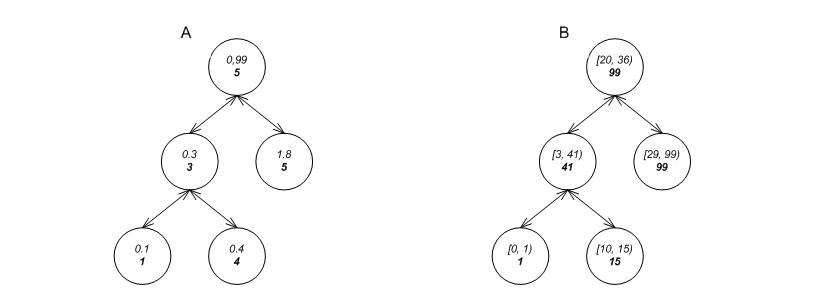
Consider the two trees in the graphic below, labels A and B. The first
is a tree of floats; the second is a tree of pairs, each
signifying a geometric line interval. Each element in a tree is referred to as a node of the tree. Of course, each of
these trees can support the usual queries: the first can easily
search for 0.4; the second can easily search for
std::make_pair(10, 41).
Each of these trees can efficiently support other queries.
The first can efficiently determine that the 2rd key in the
tree is 0.3; the second can efficiently determine
whether any of its intervals overlaps
std::make_pair(29,42)
(useful in geometric
applications or distributed file systems with leases, for
example). It should be noted that an std::set can
only solve these types of problems with linear complexity.
In order to do so, each tree stores some metadata in each node, and maintains node invariants (see [biblio.clrs2001].) The first stores in each node the size of the sub-tree rooted at the node; the second stores at each node the maximal endpoint of the intervals at the sub-tree rooted at the node.
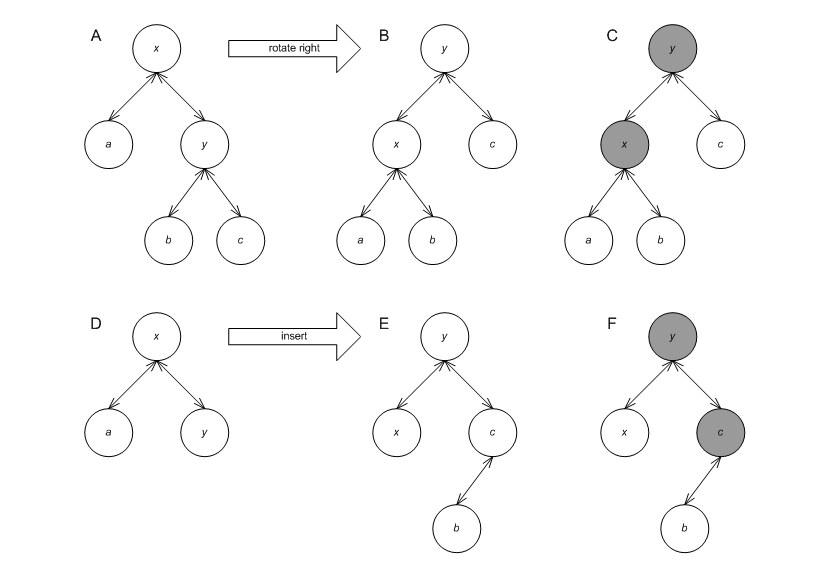
Supporting such trees is difficult for a number of reasons:
There must be a way to specify what a node's metadata should be (if any).
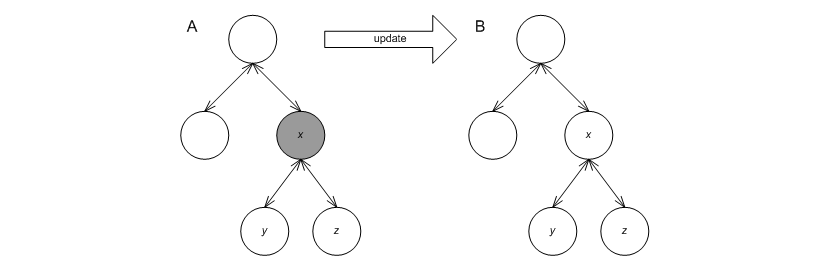
Various operations can invalidate node invariants. The graphic below shows how a right rotation, performed on A, results in B, with nodes x and y having corrupted invariants (the grayed nodes in C). The graphic shows how an insert, performed on D, results in E, with nodes x and y having corrupted invariants (the grayed nodes in F). It is not feasible to know outside the tree the effect of an operation on the nodes of the tree.
The search paths of standard associative containers are defined by comparisons between keys, and not through metadata.
It is not feasible to know in advance which methods trees can support. Besides the usual
findmethod, the first tree can support afind_by_ordermethod, while the second can support anoverlapsmethod.
These problems are solved by a combination of two means: node iterators, and template-template node updater parameters.
Each tree-based container defines two additional iterator
types, const_node_iterator
and node_iterator.
These iterators allow descending from a node to one of its
children. Node iterator allow search paths different than those
determined by the comparison functor. The tree
supports the methods:
const_node_iterator node_begin() const; node_iterator node_begin(); const_node_iterator node_end() const; node_iterator node_end();
The first pairs return node iterators corresponding to the root node of the tree; the latter pair returns node iterators corresponding to a just-after-leaf node.
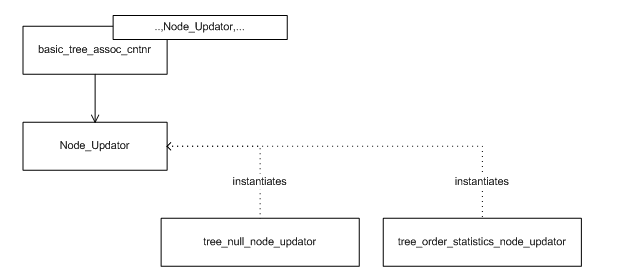
The tree-based containers are parametrized by a
Node_Update template-template parameter. A
tree-based container instantiates
Node_Update to some
node_update class, and publicly subclasses
node_update. The graphic below shows this
scheme, as well as some predefined policies (which are explained
below).
node_update (an instantiation of
Node_Update) must define metadata_type as
the type of metadata it requires. For order statistics,
e.g., metadata_type might be size_t.
The tree defines within each node a metadata_type
object.
node_update must also define the following method
for restoring node invariants:
void operator()(node_iterator nd_it, const_node_iterator end_nd_it)
In this method, nd_it is a
node_iterator corresponding to a node whose
A) all descendants have valid invariants, and B) its own
invariants might be violated; end_nd_it is
a const_node_iterator corresponding to a
just-after-leaf node. This method should correct the node
invariants of the node pointed to by
nd_it. For example, say node x in the
graphic below label A has an invalid invariant, but its' children,
y and z have valid invariants. After the invocation, all three
nodes should have valid invariants, as in label B.
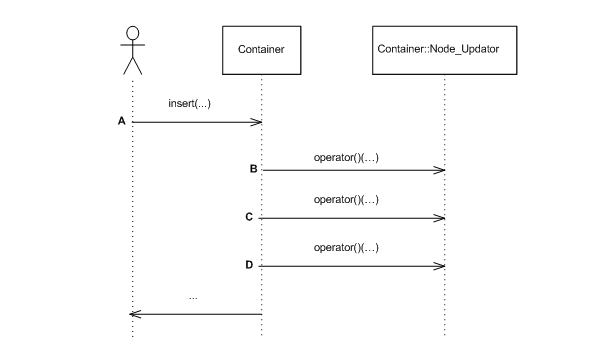
When a tree operation might invalidate some node invariant,
it invokes this method in its node_update base to
restore the invariant. For example, the graphic below shows
an insert operation (point A); the tree performs some
operations, and calls the update functor three times (points B,
C, and D). (It is well known that any insert,
erase, split or join, can restore
all node invariants by a small number of node invariant updates ([biblio.clrs2001])
.
To complete the description of the scheme, three questions need to be answered:
How can a tree which supports order statistics define a method such as
find_by_order?How can the node updater base access methods of the tree?
How can the following cyclic dependency be resolved?
node_updateis a base class of the tree, yet it uses node iterators defined in the tree (its child).
The first two questions are answered by the fact that
node_update (an instantiation of
Node_Update) is a public base class
of the tree. Consequently:
Any public methods of
node_updateare automatically methods of the tree ([biblio.alexandrescu01modern]). Thus an order-statistics node updater,tree_order_statistics_node_updatedefines thefind_by_ordermethod; any tree instantiated by this policy consequently supports this method as well.In C++, if a base class declares a method as
virtual, it isvirtualin its subclasses. Ifnode_updateneeds to access one of the tree's methods, say the member functionend, it simply declares that method asvirtualabstract.
The cyclic dependency is solved through template-template
parameters. Node_Update is parametrized by
the tree's node iterators, its comparison functor, and its
allocator type. Thus, instantiations of
Node_Update have all information
required.
This library assumes that constructing a metadata object and
modifying it are exception free. Suppose that during some method,
say insert, a metadata-related operation
(e.g., changing the value of a metadata) throws an exception. Ack!
Rolling back the method is unusually complex.
Previously, a distinction was made between redundant policies and null policies. Node invariants show a case where null policies are required.
Assume a regular tree is required, one which need not support order statistics or interval overlap queries. Seemingly, in this case a redundant policy - a policy which doesn't affect nodes' contents would suffice. This, would lead to the following drawbacks:
Each node would carry a useless metadata object, wasting space.
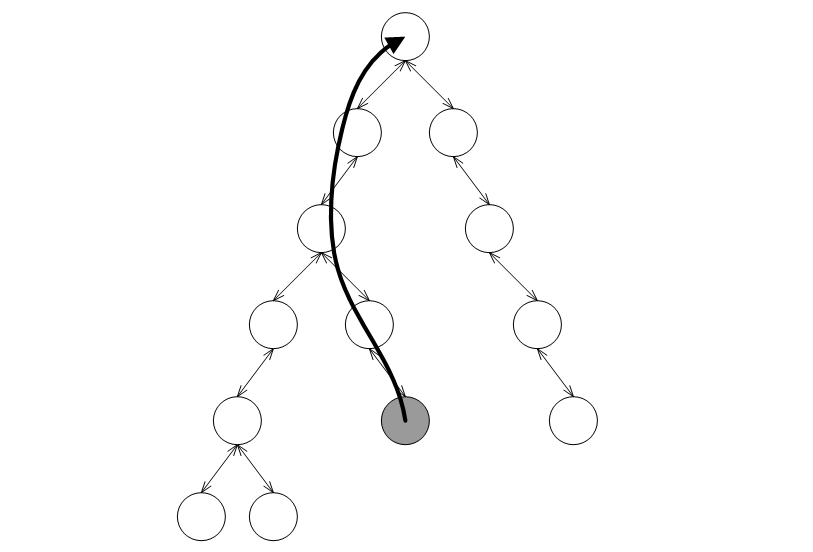
The tree cannot know if its
Node_Updatepolicy actually modifies a node's metadata (this is halting reducible). In the graphic below, assume the shaded node is inserted. The tree would have to traverse the useless path shown to the root, applying redundant updates all the way.
A null policy class, null_node_update
solves both these problems. The tree detects that node
invariants are irrelevant, and defines all accordingly.
Tree-based containers support split and join methods. It is possible to split a tree so that it passes all nodes with keys larger than a given key to a different tree. These methods have the following advantages over the alternative of externally inserting to the destination tree and erasing from the source tree:
These methods are efficient - red-black trees are split and joined in poly-logarithmic complexity; ordered-vector trees are split and joined at linear complexity. The alternatives have super-linear complexity.
Aside from orders of growth, these operations perform few allocations and de-allocations. For red-black trees, allocations are not performed, and the methods are exception-free.
The trie-based container has the following declaration:
template<typename Key, typename Mapped, typename Cmp_Fn = std::less<Key>, typename Tag = pat_trie_tag, template<typename Const_Node_Iterator, typename Node_Iterator, typename E_Access_Traits_, typename Allocator_> class Node_Update = null_node_update, typename Allocator = std::allocator<char> > class trie;
The parameters have the following meaning:
Keyis the key type.Mappedis the mapped-policy.E_Access_Traitsis described in below.Tagspecifies which underlying data structure to use, and is described shortly.Node_Updateis a policy for updating node invariants. This is described below.Allocatoris an allocator type.
The Tag parameter specifies which underlying
data structure to use. Instantiating it by pat_trie_tag, specifies an
underlying PATRICIA trie (explained shortly); any other tag is
currently illegal.
Following is a description of a (PATRICIA) trie (this implementation follows [biblio.okasaki98mereable] and [biblio.filliatre2000ptset]).
A (PATRICIA) trie is similar to a tree, but with the following differences:
It explicitly views keys as a sequence of elements. E.g., a trie can view a string as a sequence of characters; a trie can view a number as a sequence of bits.
It is not (necessarily) binary. Each node has fan-out n + 1, where n is the number of distinct elements.
It stores values only at leaf nodes.
Internal nodes have the properties that A) each has at least two children, and B) each shares the same prefix with any of its descendant.
A (PATRICIA) trie has some useful properties:
It can be configured to use large node fan-out, giving it very efficient find performance (albeit at insertion complexity and size).
It works well for common-prefix keys.
It can support efficiently queries such as which keys match a certain prefix. This is sometimes useful in file systems and routers, and for "type-ahead" aka predictive text matching on mobile devices.
A trie inherently views its keys as sequences of elements.
For example, a trie can view a string as a sequence of
characters. A trie needs to map each of n elements to a
number in {0, n - 1}. For example, a trie can map a
character c to
static_cast<size_t>(c)
.
Seemingly, then, a trie can assume that its keys support
(const) iterators, and that the value_type of this
iterator can be cast to a size_t. There are several
reasons, though, to decouple the mechanism by which the trie
accesses its keys' elements from the trie:
In some cases, the numerical value of an element is inappropriate. Consider a trie storing DNA strings. It is logical to use a trie with a fan-out of 5 = 1 + |{'A', 'C', 'G', 'T'}|. This requires mapping 'T' to 3, though.
In some cases the keys' iterators are different than what is needed. For example, a trie can be used to search for common suffixes, by using strings'
reverse_iterator. As another example, a trie mapping UNICODE strings would have a huge fan-out if each node would branch on a UNICODE character; instead, one can define an iterator iterating over 8-bit (or less) groups.
trie is,
consequently, parametrized by E_Access_Traits -
traits which instruct how to access sequences' elements.
string_trie_e_access_traits
is a traits class for strings. Each such traits define some
types, like:
typename E_Access_Traits::const_iterator
is a const iterator iterating over a key's elements. The traits class must also define methods for obtaining an iterator to the first and last element of a key.
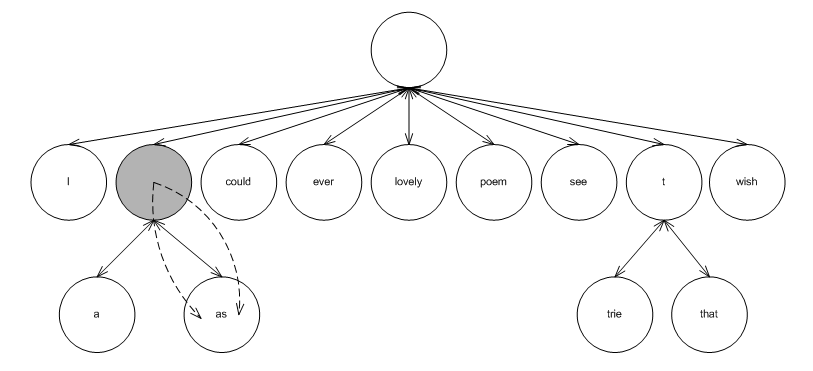
The graphic below shows a (PATRICIA) trie resulting from inserting the words: "I wish that I could ever see a poem lovely as a trie" (which, unfortunately, does not rhyme).
The leaf nodes contain values; each internal node contains
two typename E_Access_Traits::const_iterator
objects, indicating the maximal common prefix of all keys in
the sub-tree. For example, the shaded internal node roots a
sub-tree with leafs "a" and "as". The maximal common prefix is
"a". The internal node contains, consequently, to const
iterators, one pointing to 'a', and the other to
's'.
Trie-based containers support node invariants, as do tree-based containers. There are two minor differences, though, which, unfortunately, thwart sharing them sharing the same node-updating policies:
A trie's
Node_Updatetemplate-template parameter is parametrized byE_Access_Traits, while a tree'sNode_Updatetemplate-template parameter is parametrized byCmp_Fn.Tree-based containers store values in all nodes, while trie-based containers (at least in this implementation) store values in leafs.
The graphic below shows the scheme, as well as some predefined policies (which are explained below).
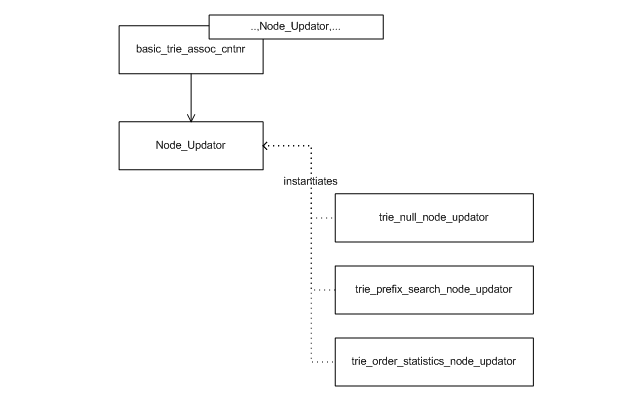
This library offers the following pre-defined trie node updating policies:
trie_order_statistics_node_updatesupports order statistics.trie_prefix_search_node_updatesupports searching for ranges that match a given prefix.null_node_updateis the null node updater.
The list-based container has the following declaration:
template<typename Key, typename Mapped, typename Eq_Fn = std::equal_to<Key>, typename Update_Policy = move_to_front_lu_policy<>, typename Allocator = std::allocator<char> > class list_update;
The parameters have the following meaning:
Keyis the key type.Mappedis the mapped-policy.Eq_Fnis a key equivalence functor.Update_Policyis a policy updating positions in the list based on access patterns. It is described in the following subsection.Allocatoris an allocator type.
A list-based associative container is a container that stores elements in a linked-list. It does not order the elements by any particular order related to the keys. List-based containers are primarily useful for creating "multimaps". In fact, list-based containers are designed in this library expressly for this purpose.
List-based containers might also be useful for some rare cases, where a key is encapsulated to the extent that only key-equivalence can be tested. Hash-based containers need to know how to transform a key into a size type, and tree-based containers need to know if some key is larger than another. List-based associative containers, conversely, only need to know if two keys are equivalent.
Since a list-based associative container does not order elements by keys, is it possible to order the list in some useful manner? Remarkably, many on-line competitive algorithms exist for reordering lists to reflect access prediction. (See [biblio.motwani95random] and [biblio.andrew04mtf]).
The graphic below shows a simple list of integer keys. If we search for the integer 6, we are paying an overhead: the link with key 6 is only the fifth link; if it were the first link, it could be accessed faster.

List-update algorithms reorder lists as elements are accessed. They try to determine, by the access history, which keys to move to the front of the list. Some of these algorithms require adding some metadata alongside each entry.
For example, in the graphic below label A shows the counter algorithm. Each node contains both a key and a count metadata (shown in bold). When an element is accessed (e.g. 6) its count is incremented, as shown in label B. If the count reaches some predetermined value, say 10, as shown in label C, the count is set to 0 and the node is moved to the front of the list, as in label D.
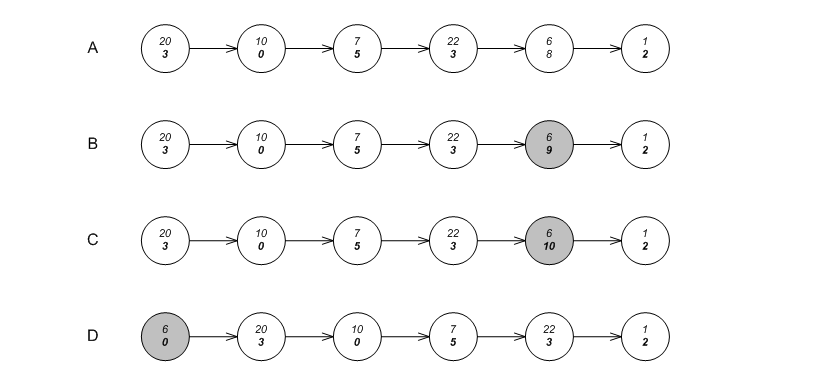
this library allows instantiating lists with policies implementing any algorithm moving nodes to the front of the list (policies implementing algorithms interchanging nodes are unsupported).
Associative containers based on lists are parametrized by a
Update_Policy parameter. This parameter defines the
type of metadata each node contains, how to create the
metadata, and how to decide, using this metadata, whether to
move a node to the front of the list. A list-based associative
container object derives (publicly) from its update policy.
An instantiation of Update_Policy must define
internally update_metadata as the metadata it
requires. Internally, each node of the list contains, besides
the usual key and data, an instance of typename
Update_Policy::update_metadata.
An instantiation of Update_Policy must define
internally two operators:
update_metadata operator()(); bool operator()(update_metadata &);
The first is called by the container object, when creating a new node, to create the node's metadata. The second is called by the container object, when a node is accessed ( when a find operation's key is equivalent to the key of the node), to determine whether to move the node to the front of the list.
The library contains two predefined implementations of
list-update policies. The first
is lu_counter_policy, which implements the
counter algorithm described above. The second is
lu_move_to_front_policy,
which unconditionally move an accessed element to the front of
the list. The latter type is very useful in this library,
since there is no need to associate metadata with each element.
(See [biblio.andrew04mtf]
In this library, there are no equivalents for the standard's multimaps and multisets; instead one uses an associative container mapping primary keys to secondary keys.
List-based containers are especially useful as associative containers for secondary keys. In fact, they are implemented here expressly for this purpose.
To begin with, these containers use very little per-entry structure memory overhead, since they can be implemented as singly-linked lists. (Arrays use even lower per-entry memory overhead, but they are less flexible in moving around entries, and have weaker invalidation guarantees).
More importantly, though, list-based containers use very little per-container memory overhead. The memory overhead of an empty list-based container is practically that of a pointer. This is important for when they are used as secondary associative-containers in situations where the average ratio of secondary keys to primary keys is low (or even 1).
In order to reduce the per-container memory overhead as much as possible, they are implemented as closely as possible to singly-linked lists.
List-based containers do not store internally the number of values that they hold. This means that their
sizemethod has linear complexity (just likestd::list). Note that finding the number of equivalent-key values in a standard multimap also has linear complexity (because it must be done, viastd::distanceof the multimap'sequal_rangemethod), but usually with higher constants.Most associative-container objects each hold a policy object (a hash-based container object holds a hash functor). List-based containers, conversely, only have class-wide policy objects.
The priority queue container has the following declaration:
template<typename Value_Type, typename Cmp_Fn = std::less<Value_Type>, typename Tag = pairing_heap_tag, typename Allocator = std::allocator<char > > class priority_queue;
The parameters have the following meaning:
Value_Typeis the value type.Cmp_Fnis a value comparison functorTagspecifies which underlying data structure to use.Allocatoris an allocator type.
The Tag parameter specifies which underlying
data structure to use. Instantiating it bypairing_heap_tag,binary_heap_tag,
binomial_heap_tag,
rc_binomial_heap_tag,
or thin_heap_tag,
specifies, respectively,
an underlying pairing heap ([biblio.fredman86pairing]),
binary heap ([biblio.clrs2001]),
binomial heap ([biblio.clrs2001]),
a binomial heap with a redundant binary counter ([biblio.maverick_lowerbounds]),
or a thin heap ([biblio.kt99fat_heaps]).
As mentioned in the tutorial,
__gnu_pbds::priority_queue shares most of the
same interface with std::priority_queue.
E.g. if q is a priority queue of type
Q, then q.top() will
return the "largest" value in the container (according to
typename
Q::cmp_fn). __gnu_pbds::priority_queue
has a larger (and very slightly different) interface than
std::priority_queue, however, since typically
push and pop are deemed
insufficient for manipulating priority-queues.
Different settings require different priority-queue implementations which are described in later; see traits discusses ways to differentiate between the different traits of different implementations.
There are many different underlying-data structures for
implementing priority queues. Unfortunately, most such
structures are oriented towards making push and
top efficient, and consequently don't allow efficient
access of other elements: for instance, they cannot support an efficient
find method. In the use case where it
is important to both access and "do something with" an
arbitrary value, one would be out of luck. For example, many graph algorithms require
modifying a value (typically increasing it in the sense of the
priority queue's comparison functor).
In order to access and manipulate an arbitrary value in a priority queue, one needs to reference the internals of the priority queue from some form of an associative container - this is unavoidable. Of course, in order to maintain the encapsulation of the priority queue, this needs to be done in a way that minimizes exposure to implementation internals.
In this library the priority queue's insert
method returns an iterator, which if valid can be used for subsequent modify and
erase operations. This both preserves the priority
queue's encapsulation, and allows accessing arbitrary values (since the
returned iterators from the push operation can be
stored in some form of associative container).
Priority queues' iterators present a problem regarding their
invalidation guarantees. One assumes that calling
operator++ on an iterator will associate it
with the "next" value. Priority-queues are
self-organizing: each operation changes what the "next" value
means. Consequently, it does not make sense that push
will return an iterator that can be incremented - this can have
no possible use. Also, as in the case of hash-based containers,
it is awkward to define if a subsequent push operation
invalidates a prior returned iterator: it invalidates it in the
sense that its "next" value is not related to what it
previously considered to be its "next" value. However, it might not
invalidate it, in the sense that it can be
de-referenced and used for modify and erase
operations.
Similarly to the case of the other unordered associative
containers, this library uses a distinction between
point-type and range type iterators. A priority queue's iterator can always be
converted to a point_iterator, and a
const_iterator can always be converted to a
point_const_iterator.
The following snippet demonstrates manipulating an arbitrary value:
// A priority queue of integers. priority_queue<int > p; // Insert some values into the priority queue. priority_queue<int >::point_iterator it = p.push(0); p.push(1); p.push(2); // Now modify a value. p.modify(it, 3); assert(p.top() == 3);
It should be noted that an alternative design could embed an associative container in a priority queue. Could, but most probably should not. To begin with, it should be noted that one could always encapsulate a priority queue and an associative container mapping values to priority queue iterators with no performance loss. One cannot, however, "un-encapsulate" a priority queue embedding an associative container, which might lead to performance loss. Assume, that one needs to associate each value with some data unrelated to priority queues. Then using this library's design, one could use an associative container mapping each value to a pair consisting of this data and a priority queue's iterator. Using the embedded method would need to use two associative containers. Similar problems might arise in cases where a value can reside simultaneously in many priority queues.
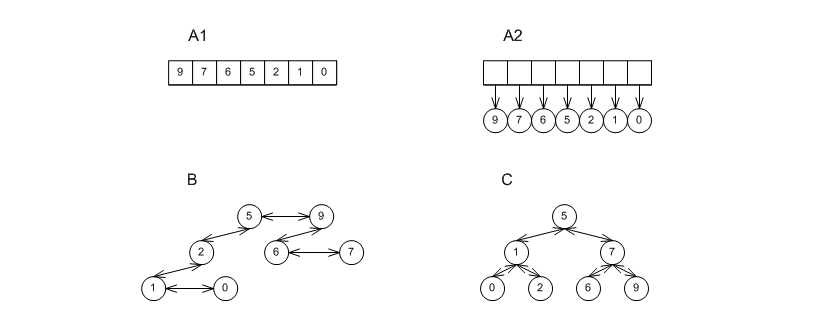
There are three main implementations of priority queues: the first employs a binary heap, typically one which uses a sequence; the second uses a tree (or forest of trees), which is typically less structured than an associative container's tree; the third simply uses an associative container. These are shown in the graphic below, in labels A1 and A2, label B, and label C.
Roughly speaking, any value that is both pushed and popped from a priority queue must incur a logarithmic expense (in the amortized sense). Any priority queue implementation that would avoid this, would violate known bounds on comparison-based sorting (see [biblio.clrs2001] and [biblio.brodal96priority]).
Most implementations do
not differ in the asymptotic amortized complexity of
push and pop operations, but they differ in
the constants involved, in the complexity of other operations
(e.g., modify), and in the worst-case
complexity of single operations. In general, the more
"structured" an implementation (i.e., the more internal
invariants it possesses) - the higher its amortized complexity
of push and pop operations.
This library implements different algorithms using a
single class: priority_queue.
Instantiating the Tag template parameter, "selects"
the implementation:
Instantiating
Tag = binary_heap_tagcreates a binary heap of the form in represented in the graphic with labels A1 or A2. The former is internally selected by priority_queue ifValue_Typeis instantiated by a primitive type (e.g., an int); the latter is internally selected for all other types (e.g.,std::string). This implementations is relatively unstructured, and so has goodpushandpopperformance; it is the "best-in-kind" for primitive types, e.g., ints. Conversely, it has high worst-case performance, and can support only linear-timemodifyanderaseoperations.Instantiating
Tag = pairing_heap_tagcreates a pairing heap of the form in represented by label B in the graphic above. This implementations too is relatively unstructured, and so has goodpushandpopperformance; it is the "best-in-kind" for non-primitive types, e.g.,std:strings. It also has very good worst-casepushandjoinperformance (O(1)), but has high worst-casepopcomplexity.Instantiating
Tag = binomial_heap_tagcreates a binomial heap of the form repsented by label B in the graphic above. This implementations is more structured than a pairing heap, and so has worsepushandpopperformance. Conversely, it has sub-linear worst-case bounds forpop, e.g., and so it might be preferred in cases where responsiveness is important.Instantiating
Tag = rc_binomial_heap_tagcreates a binomial heap of the form represented in label B above, accompanied by a redundant counter which governs the trees. This implementations is therefore more structured than a binomial heap, and so has worsepushandpopperformance. Conversely, it guarantees O(1)pushcomplexity, and so it might be preferred in cases where the responsiveness of a binomial heap is insufficient.Instantiating
Tag = thin_heap_tagcreates a thin heap of the form represented by the label B in the graphic above. This implementations too is more structured than a pairing heap, and so has worsepushandpopperformance. Conversely, it has better worst-case and identical amortized complexities than a Fibonacci heap, and so might be more appropriate for some graph algorithms.
Of course, one can use any order-preserving associative
container as a priority queue, as in the graphic above label C, possibly by creating an adapter class
over the associative container (much as
std::priority_queue can adapt std::vector).
This has the advantage that no cross-referencing is necessary
at all; the priority queue itself is an associative container.
Most associative containers are too structured to compete with
priority queues in terms of push and pop
performance.
It would be nice if all priority queues could share exactly the same behavior regardless of implementation. Sadly, this is not possible. Just one for instance is in join operations: joining two binary heaps might throw an exception (not corrupt any of the heaps on which it operates), but joining two pairing heaps is exception free.
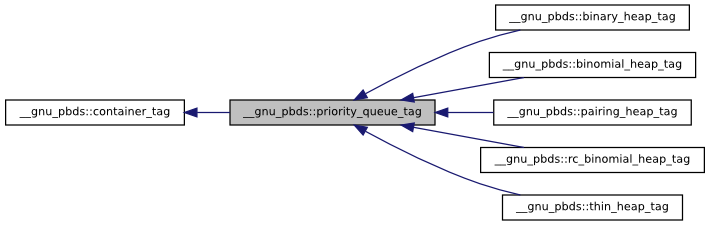
Tags and traits are very useful for manipulating generic
types. __gnu_pbds::priority_queue
publicly defines container_category as one of the tags. Given any
container Cntnr, the tag of the underlying
data structure can be found via typename
Cntnr::container_category; this is one of the possible tags shown in the graphic below.
Additionally, a traits mechanism can be used to query a
container type for its attributes. Given any container
Cntnr, then
__gnu_pbds::container_traits<Cntnr>
is a traits class identifying the properties of the container.
To find if a container might throw if two of its objects are joined, one can use
container_traits<Cntnr>::split_join_can_throw
Different priority-queue implementations have different invalidation guarantees. This is especially important, since there is no way to access an arbitrary value of priority queues except for iterators. Similarly to associative containers, one can use
container_traits<Cntnr>::invalidation_guarantee
to get the invalidation guarantee type of a priority queue.
It is easy to understand from the graphic above, what container_traits<Cntnr>::invalidation_guarantee
will be for different implementations. All implementations of
type represented by label B have point_invalidation_guarantee:
the container can freely internally reorganize the nodes -
range-type iterators are invalidated, but point-type iterators
are always valid. Implementations of type represented by labels A1 and A2 have basic_invalidation_guarantee:
the container can freely internally reallocate the array - both
point-type and range-type iterators might be invalidated.
This has major implications, and constitutes a good reason to avoid
using binary heaps. A binary heap can perform modify
or erase efficiently given a valid point-type
iterator. However, in order to supply it with a valid point-type
iterator, one needs to iterate (linearly) over all
values, then supply the relevant iterator (recall that a
range-type iterator can always be converted to a point-type
iterator). This means that if the number of modify or
erase operations is non-negligible (say
super-logarithmic in the total sequence of operations) - binary
heaps will perform badly.